十年前,他以本科生的身份走入清华电子系;十年后,他将以一名教师的身份重回清华,在叉院开启新的篇章,传递知识,探索真理。想象一下:

在未来的某一天,你,一位996的「社畜」,或「上班狗」,辛苦一天回到家,瘫倒在沙发上。当你抬头一看,你的机器人朋友正在厨房为你做晚饭——它的双手敏捷灵活,在油盐酱醋与锅碗瓢盆之间,一顿优雅操作,不久便有阵阵香气扑鼻而来。它把晚餐端到餐桌上,对你微微一笑:「开饭啦!」然后转身拿起你换下的衣物走向洗衣机......
这不是一篇小学生的科幻小作文,而是许华哲作为一位机器人学研究者关于未来机器人的想象:「我希望能有一个真正通用的机器人,它什么都能做,或者至少能为人类完成家居场景里的大部分任务。」

最近,他在走向通用机器人的这条路上又前进了一步:想要机器人为我们包饺子、卷寿司?先让机器人从学习捏橡皮泥开始吧!
不久前,许华哲团队的一篇论文被顶级会议RSS接收。这项工作提出了一种全新的系统架构,将传感数据转化成粒子网络,并通过图神经网络学习动力学模型,以此实现对柔性物体进行精确操控。

论文链接:https://arxiv.org/pdf/2205.02909.pdf
这个框架由三个核心模块组成:第一是基于粒子的场景表示模块,让“看到”橡皮泥;第二是GNN模型模拟对象动态;第三是一个梯度采样预测控制模块,用以塑形橡皮泥。

实验结果显示,无论是在虚拟环境还是现实世界中,这个基于模型规划框架都表现出色,与人类甚至超越了人类水平。
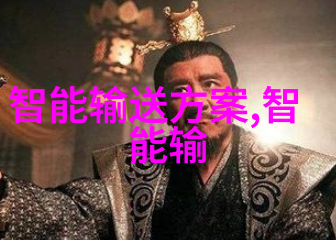
图注:RoboCraft与人类在捏橡皮泥任务上的对比。在模拟环境中,是鼠标和键盘控制机械臂。在现实世界中,是直接操作机械臂。当然,这只是许华哲征服AI领域的一个小胜利。他本科毕业于清华大学电子工程专业,后攻读博士于加州大学伯克利分校,现在则担任斯坦福大学博士后研究员,其导师吴佳俊教授是一位计算视觉领域新星。此秋季,他将返回母校清华,从事交叉信息研究院(也称“姚班”)教师职务。他对于AI科技评论说:“我希望能够推动一种真正通用的AI,它可以完成大多数家庭任务。”他的职业生涯并非一直专注于机器人学,从本科到博士期间,他不断调整自己的方向:初次接触计算视觉是在多伦多大学交流时,再到伯克利深造时结合视觉自动驾驶,最终选择应用强化学习于機智體。

每一次转变,都使他离寻求的人工智能和通用機智體更进一步。
初识计算图像
2012年,当他从东北师大附中的物理竞赛保送进入清华大学电子工程专业时,就曾梦想着成为IT行业的一份子。他解释说:“当时我的想法比较简单,就觉得电子工程离新技术很近。”
从自动驾驶到機智體
2016年,他前往美国加州大学伯克莱分校攻读博士学位,并踏上了機智體研发之旅。在申请伯克莱之前,有幸参与暑期实习项目,那里的研究团队正是他将要加入的团队之一。
重新定位與展望
经过十年的奋斗和探索,此刻许華哲將帶著丰富经验回到母校清華大學,为下一個學術篇章打下基石。一路以来,由於對計算視覺、自動駕駛乃至機械學等領域持續追求直觀性的渴望,使得許華哲逐步將興趣轉移到可控且運動自由的人工智能身上。他們相信,只要繼續努力,不僅會創造出更多革命性的技術,也會為未來世代帶來更加美好的生活。而這一切,只因為那份最初對於未知世界充滿好奇的心情,以及那份永不言弃追求卓越精神。