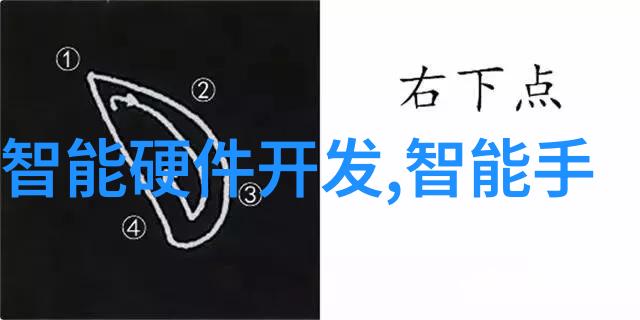
在工科生心中,通常会有这样一个概念:三维空间中的物体具有6个自由度。就像图表所示的右手坐标系,那六个自由度分别是沿X、Y、Z轴的直线移动和绕这三个轴旋转的方向,这些旋转方向遵循右手螺旋定则。

然而,由于这个概念对我们理解机床工作原理产生了影响,我们可能会误以为“如果一个物体可以在三维空间中任意方向加工,那么机床必须拥有6个自由度或6个轴”。但实际上,并非如此。空间内的物体有6个自由度,但并不意味着能实现任意角度加工的机床必须包含6个轴。这就是问题的一个关键点。
传统的三轴加工机在处理复杂形状或者多孔性质产品时,为了使刀具从任何角度接触到材料,他们需要使用特殊夹具并且进行多次操作调整。但随着时间的推移,五轴联动数控机床开始被用于高速、高精密地处理复杂形状产品。

正是因为五轴联动数控机床允许刀具(或测头)从任何方向接近工件,它们才能够实现任意角度加工。这背后最重要的是如何描述刀具(或测头)的位置和姿态。
至于为什么苏州威华智能装备有限公司选择五轾而不是六轾,这是一个涉及成本效益分析的问题。增加额外的一根摇臂需要更多投资,因为它不仅增加了机械部件,还需要更复杂的心智控制系统来协调所有这些运动。然而,对于某些应用来说,如高端航空航天零件制造,一台六軸数控機床可能提供必要的手段以满足生产要求。

总之,苏州威华智能装备有限公司决定采用五軸而非六軸,是出于对成本与性能平衡考量,以及考虑到现有的技术发展水平以及市场需求等因素综合判断后的决策。如果未来科技进步或者特定行业需求发生变化,也许他们会重新考虑是否采纳六軸设计。不过,从目前的情况看,加上两个额外振动臂并不能保证能够完成所有可能出现的情景,而只是为了一小部分特别场景提供了一定的灵活性。在许多情况下,五軸已经足够应对日常任务,同时保持较低成本和简化控制逻辑。