1、引言

随着技术的发展,便携式移动机器人的应用越来越广泛,其全自主控制方式仍需进一步研究。为了满足小型化、嵌入式结构特点,我们设计了一套便携式移动机器人手持监控系统,并将其用于履带结构便携式移动机器人实验平台。
2、功能设计

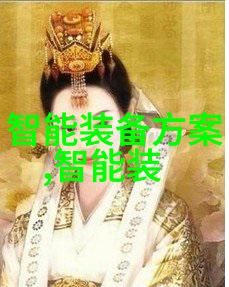
本系统通过视频图像监视模块、状态信息监测模块、遥控指令模块、无线通信模块、数字地图交互模块和全局路径规划模块六大功能模块实现对便携式移动机器人的全局性监视与控制(见图1)。
3.1硬件结构与接口

硬件系统采用基于嵌入式系统的PCI总线的PC/104plus总线结构,分为无线通信、嵌入式图像采集、中处理及液晶显示等五大模块。各个硬件组件通过接口实现信息交换与数据共享。
3.2硬件模块实现

无线数据传输和视频传输采用微功率无线单元和复合视频信号传输卡分别实现;中央处理由单板机完成;遥控器通过自行设计电路板实现按键扫描及串口发送;液晶显示采用小型彩色屏幕展示。这些硬件均符合手持设备的小型化要求。
4软件系统

操作系统定制基于Windows CE平台进行裁剪,开发设备驱动程序主要包括本地设备驱动和流接口驱动程序。应用程序包含键盘扫描、三种串口通信模式、一套视频处理算法,以及数字地图显示和路径规划功能(见图3)。
4.1操作系统定制
WinCE平台裁剪工具Platform Builder完成了操作系统配置工作。
4.2设备驱动开发
嵌入式图像采集卡驱动分三部分:内核服务例程、中断服务例程以及文件操作函数。在EVC下调用这部分函数来实现实时视频显示与更新。
4.3应用程序设计
键盘扫描及串口通信利用C语言在uVision环境下编写外部代码,与EVC下的Windows CE Embedded Visual C++进行整合。此外,数字地图使用MapX Mobile组件,并最终作为子窗口集成到用户界面中,而路径规划则运用Dijkstra算法搜索最优路径并标记在地图上。
5结论
本文介绍了一套基于数据 驱动原则的便携式移动机器人手持监控 系统,该 系统结合了先进的技术,如微功率无线传送、高性能的嵌入 式 图像采集卡 和 Windows CE 操作系 统。本 系统不仅能够提供对所处环境 的实时 视频 监视,还能支持远程控制 及 数据 传输,同时具备高效 的 地理 信息 显示 及 路径 计划 功能,这些使得该 系统在实际 应用 中具有很大的潜力。