智能环保装备技术:工业机器人系统构成与性能指标

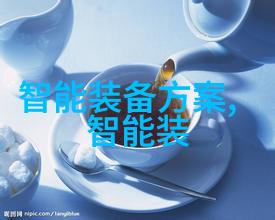
在当前的工业自动化领域,6轴工业机器人作为应用最广泛的型号,其组成和功能至关重要。从外观上看,一个6轴工业机器人的主要部分包括:机器人本体、控制柜和示教器。
从内部系统结构来分析,这类机器人由五个关键系统构成:机械臂连杆、控制系统、驱动系统、传动单元以及传感器系统。

机械臂本体是执行各种操作的核心部分,包含了机械臯连杆、传动单元(减速机构)、驱动电机(伺服电机)以及内置传感器(编码器)。通过六个伺服电机会通过减速机构与同步带轮等将旋转转换为关节轴上的运动。
驱动系统包含驱动设备和电源装置,是将电子信号转化为角位移的信号处理模块。这些驱动设备安装在机械臯本体内,与每个关节相关联。在整个机器人的运行中,驱动系统直接受到控制。除了电气驱动,还有气缸液压缸等类型,而目前,大多数工业用途中的交流伺服电机会被广泛采用,每个驱动设备配备一个对应的电力源,以便于精确地控制每个关节。

传导单元通常采用减速机构,如RV减速机构或谐波减速机构。RV减速机构用于承载重负荷的位置,比如20kg以上,而谐波减缩则适用于轻负载位置,如20kg以下。这两种类型都能够提供必要的速度比以确保高效率和准确性。此外,一些特殊情况下也会使用皮带式传递手段进行工作。
控制模块是根据命令及来自传感信息来指导末端执行者完成特定任务或作业流程的一系列计算硬件软件组合。这一部分也是决定整体性能并且不断更新发展最快的一个区域,它包括了示教功能记忆能力位置伺服功能坐标设定外围接口故障诊断安全保护等各项服务功能。

传感子系负责收集有关末端执行者的状态信息或者与外部环境进行数据交换,就像人类需要感觉到身体各部份一样,为了知道自己的总形态而不仅仅是某一部份。一套集成在内部的手册编码仪向驾驶员反馈关于每一个连接点及其相应物料移动过程中所采取行动的情况,然后再发送给中央电脑以便进一步判断其姿势变化,并据此调整自身行为。此外,还有一些专门用于视觉识别力矩测量等辅助任务之用的人工智能摄像头。
最后,但同样不可忽略的是示教工具,它是一台让用户可以直接操控或重新配置任何已记录下来的程序供未来的生产线使用,使得它们更加灵活可变更,无论是在制造还是维护方面都是极大的帮助。而随着时间推移,对于这类技术来说,更好的优化设计使得他们成为现代生产线不可或缺的一部分。

7 最后,在考虑到如何评估这些复杂科技产品时,我们需要了解一些关键参数,如自由度额定负载最大工作速度工作空间以及重复精度等因素,这些都关系到了它能否适应不同的行业需求。在实际应用中,他们可能涉及焊接涂装搬运码垛装配甚至更高级别任务,从而展示了我们对于新兴技术如何有效融入现实世界中的深刻理解。